Résolution 65536 de l'encodeur d'axe de la cavité K130 de la taille 150mm d'installation 55mm pour la machine de commande numérique par ordinateur
Notre service
Numéro de type relatif de la série K130
K130-T2F1024BQ48
K130-T3FH2048 BQ55
K130-T4C4096 BQ60
K130-T6E8192 BQ48
K130-T2F16384 BQ55
K130-T3F32768 BQ60
K130-T4E65536 BQ48
K130-T6C1024 BQ55
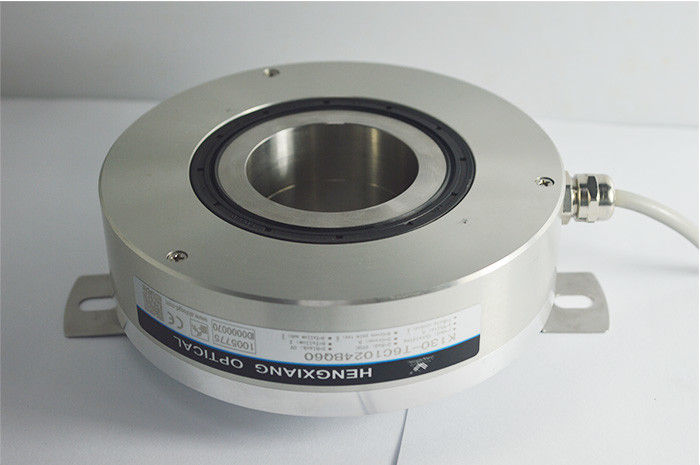
Lancement de produit de l'encodeur K130
| Articles | Paramètres de base |
| Marque | HENGXIANG |
| Type d'encodeur | Encodeur par accroissement |
| Diamètre externe | 158mm |
| Épaisseur | 43mm |
| Dimension d'installation | R85mm (plat 158T170 de ressort) |
| Type creux d'axe | par le trou (bague de serrage à antérieurement) |
| Diamètre creux d'axe | 70mm, 75mm, 78mm ; 80mm ; 82mm |
| Résolution | 1024 ; 2048 ; 20000 ; 40000 ; 80000 |
| Phase de sortie | Phase A+, B+, Z+, A, b, z |
| Tension d'alimentation | DC5V ; DC8-30V |
| Type de débouché | Câble de côté |
| Mode sortie | Sortie va-et-vient |
| amplification de puissance (26LS31) TTL | |
| amplification de puissance (DC8-30V) HTL | |
| Courant de consommation | 100mA MAX |
| Fréquence supérieure de réponse | 300KHZ |
| Résistance d'isolation | 10MΩ |
| LA terre | ne pas se relier à l'encodeur |
| commencer le couple | moins de 400 x 10-3 N.m |
| Moment d'Intertia | moins que 350x 10-6 kg.m 2 |
| Charge d'axe | 90N radial ; 60N axial |
| Tour de dessus | 3000RPM |
| La température environnementale | Opération : - 20 ~+80° ; stockage : - 25 ~+85° |
| Humidité environnementale | Opération et stockage : 35-85%RH (sans condensation) |
| Vibration (supportez) | Amplitude 1.52mm, 5-55Hz, 2 heures pour gyroscopique individuellement |
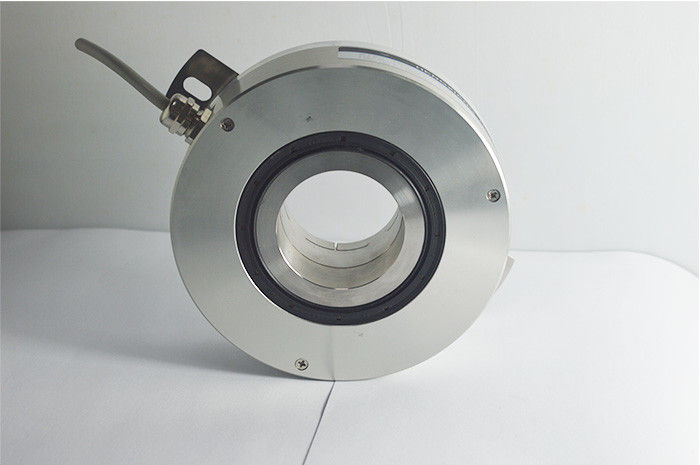
Utilisation pour le grand encodeur du trou K130
Sujets ayant besoin d'attention
1. Doit choisir la tension d'alimentation électrique : DC5V ou DC8-30V
2. Doit choisir le numéro de type de plat de ressort lame si vous choisissez l'encodeur d'axe creux
3. Veuillez conseiller le de vitesse de moteur (T/MN) que vous employez réellement
4. Si vous avez n'importe quelles autres conditions, fournissez svp les paramètres de détail
Avis pour l'installation d'encodeur
1. Veuillez lire les spécifications d'encodeur soigneusement avant installation
2. L'encodeur est appartiennent à l'instrument de précision, ainsi nous devrions éviter le choc ou la vibration pour protéger les pièces intérieures.
3. La tension d'alimentation électrique doit holded dans la marge spécifique, ou l'encodeur pourrait être détruit.
4. Notez coaxialement les conditions quand vous installez l'axe de puissance, emploient svp l'accouplement flexible et ne pressent pas l'encodeur de force.
5. L'armature du câble de l'encodeur doit être reliée pour éviter l'interférence d'électromagnétisme du courant alternatif, câbles d'encodeur devrait être disposition individuellement.
6. La connexion de diagramme de câblage devrait être strictement suivent la couleur spécifique dans le catalogue, ou le circuit intérieur d'encodeur peut être détruit
7. L'encodeur devrait être indépendamment de champ magnétique puissant, de poussière, de pétrole, d'eau, (de plus basse) température plus élevée et de matériel caustique ou inflammable pendant le travail.
8. L'encodeur que le signal de câble ne peut pas être a dessiné ou s'est plié de force.
![]()
Nos produits sont vendus dans le monde entier. Vous pouvez être assuré de l'ensemble du processus de nos produits.